Decision-Making under HRC
Artificial Intelligence Lab Research Project
Duration: Feb. 2022 - Aug. 2022
Role: Research Assistant
Skills: Data Analysis (MATLAB, Excel), Systems Development, Critical Thinking
research paperDescription
Human-robot collaboration (HRC) is an emerging field, transforming robots from mere supportive machines to active decision-making partners.
Effective decision-making within HRC is influenced by several factors, encompassing both system-related aspects like robot capabilities, and human-related elements such as individual knowledgeability.
Objective / Success Metrics
Various factors might influence the decision-making process under HRC. The objective of this study is to investigate how variances in individual knowledge levels and the quality of robot recommendations influence humans' decision-making process within the context of HRC.
Approach
-
Experimental Context and Methods:
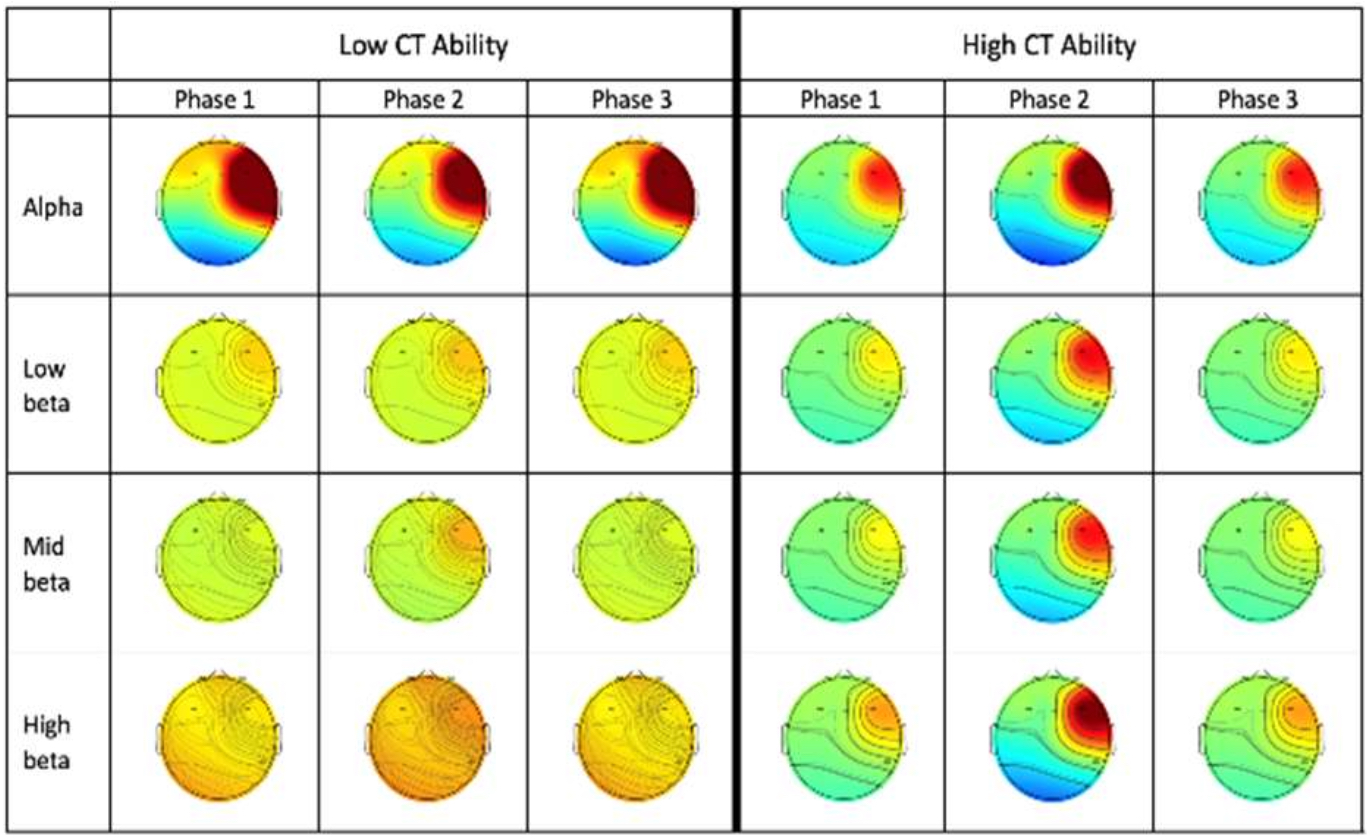
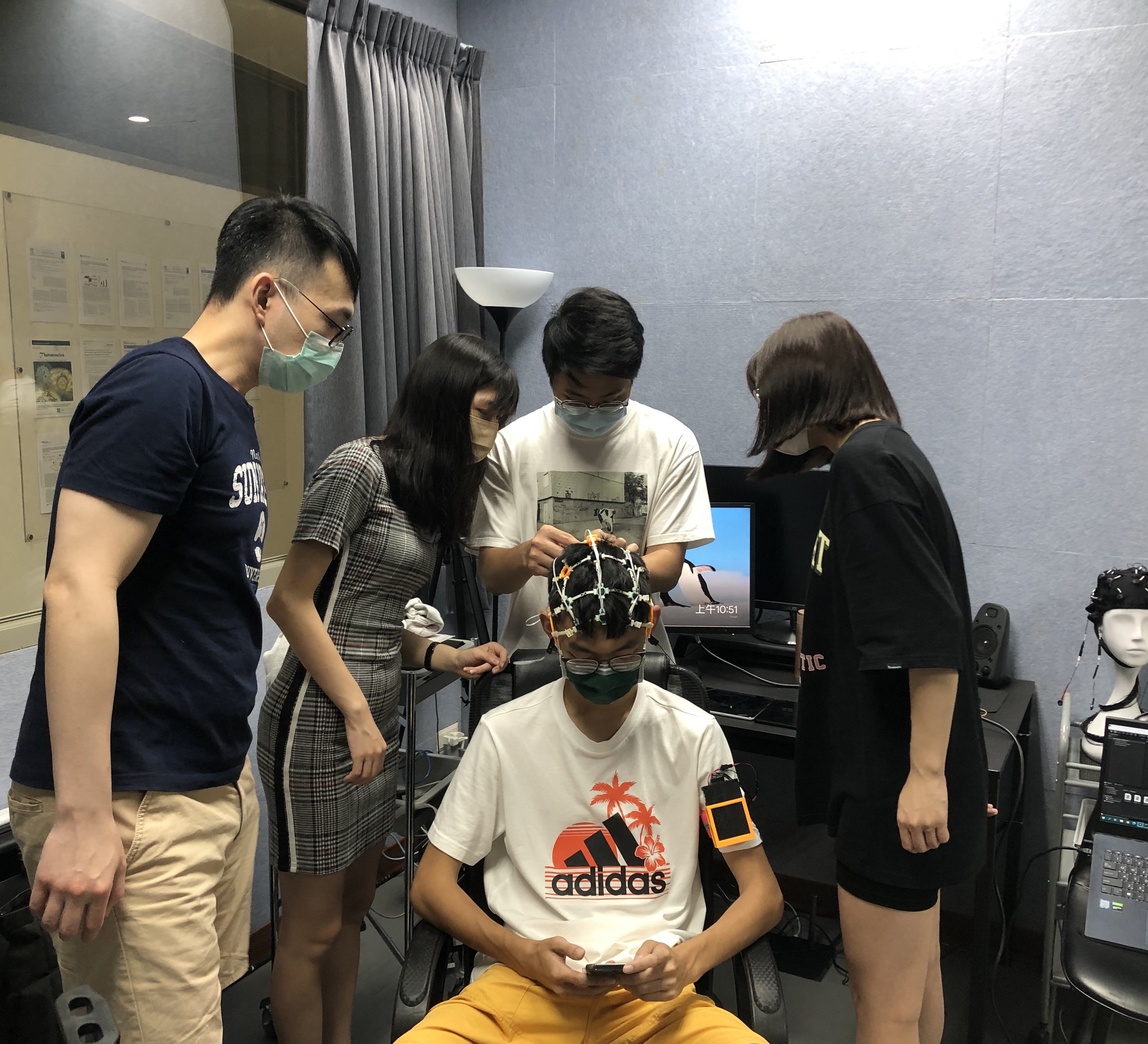
We brainstormed to determine the appropriate experimental context and evaluated different methods for analyzing collected data. Recognizing the significant influence of contextual factors on human-robot decision-making in collaborative settings, this study employs a Lego-like Electroencephalogram (EEG) headset to capture and analyze human brain activities. Additionally, we employed multiple questionnaires to assess participants' cognitive perceptions of the robot.
-
Experiment Design and Implementation:
An experimental website was developed for conducting tasks, wherein participants perform computational thinking (CT) related tasks with assistance from robotic agents possessing either high or low capability in processing questions. By manipulating robot capabilities, we explored the impact of aid quality on participants' decision-making and acceptance of technology.
-
Data Analysis and Interpretation:
Survey results were analyzed using Python and Excel, while collected EEG data underwent analysis using MATLAB and Excel.
Results
Results from the questionnaire showed the influence of robot capability was prominent in overall task performance, notably affecting users with high CT ability. Moreover, the highly capable robot received slightly more negative responses from the high CT group.
Going beyond surveys, EEG analysis results demonstrated that varying CT abilities trigger distinct brainwave patterns, with trust calibration towards the robot also influencing resultant brain activities.